第1节 更加专业的视觉系统
准备硬件,搭建小车。按照操作步骤进行小车的动力和视觉系统的测试。完成测试后,即可正式进入无人驾驶过程。
原理图
摄像头->大白\n树莓派: CSI/USB
大白\n树莓派-->客户端: WiFi
Note right of 大白\n树莓派: HTTP协议传送摄像头数据
硬件准备
硬件清单
- 树莓派
- 树莓派电机扩展板
- CSI摄像头
- 超声波传感器
- 小车套件
硬件连接
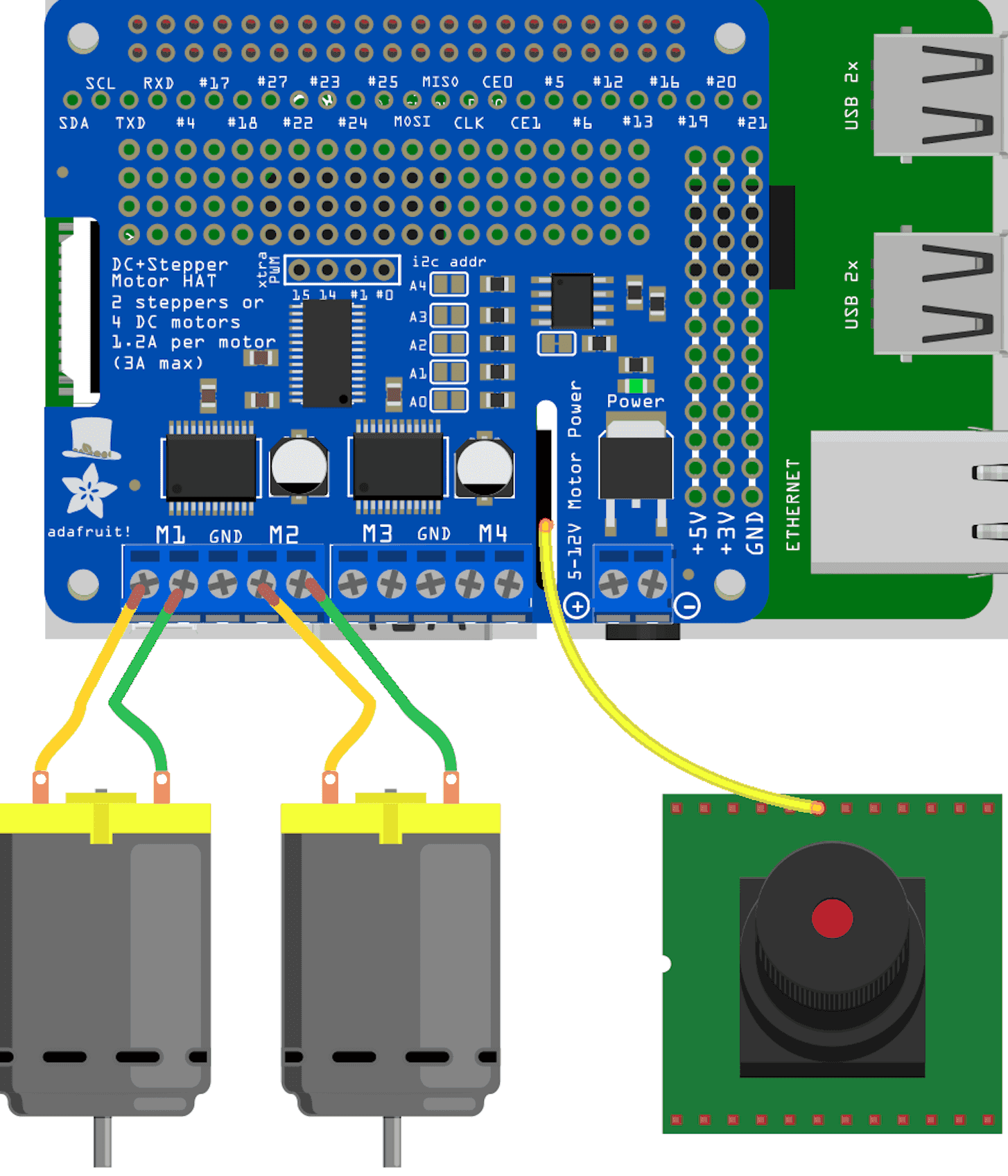
将超声波传感器连接到树莓派上 Trig——GPIO 23 Echo——GPIO 24 VCC和GND接到扩展板的Vin和GND插口
执行测试
电机测试
1.打开终端,执行以下命令
cd ~/Desktop/learn-ai/codes/chapter5/SelfDrivingCar
cd computer
#也可以使用autojump工具快速跳转,比如想访问computer路径,
#只需输入`j c`并回车即可(需要之前通过cd命令访问过)
#如果执行文件报错"Permission Denied",尝试在执行命令的最前面加上sudo
sudo python3 drive_api.py -s 150 //-s 150作为可选的参数,来指定行驶速度。可选范围是0-256
2.打开树莓派上的网络浏览器,在地址栏输入路由器管理地址,查看树莓派的IP地址
3.在浏览器地址栏输入树莓派IP:81/drive例如(192.168.123.100:81/drive)
4.在打开的界面上按键盘上的上下左右方向键来测试小车
5.测试完毕后,在终端输入ctrl + c来结束当前任务
摄像头测试
1.打开终端,执行以下命令
cd ~/Desktop/learn-ai/codes/chapter5/SelfDrivingCar
cd test
python3 stream_server_test.py
2.新建一个终端窗口
3.在新的终端窗口中输入以下命令,如果有正常的视频画面输出,则测试通过
cd ~/Desktop/learn-ai/codes/chapter5/SelfDrivingCar
cd raspberryPi
python3 stream_client.py
4.在终端输入ctrl + c来结束当前任务
超声波传感器测试
1.打开终端,执行以下命令
cd ~/Desktop/learn-ai/codes/chapter5/SelfDrivingCar
cd test
python3 ultrasonic_server_test.py
2.新建一个终端窗口
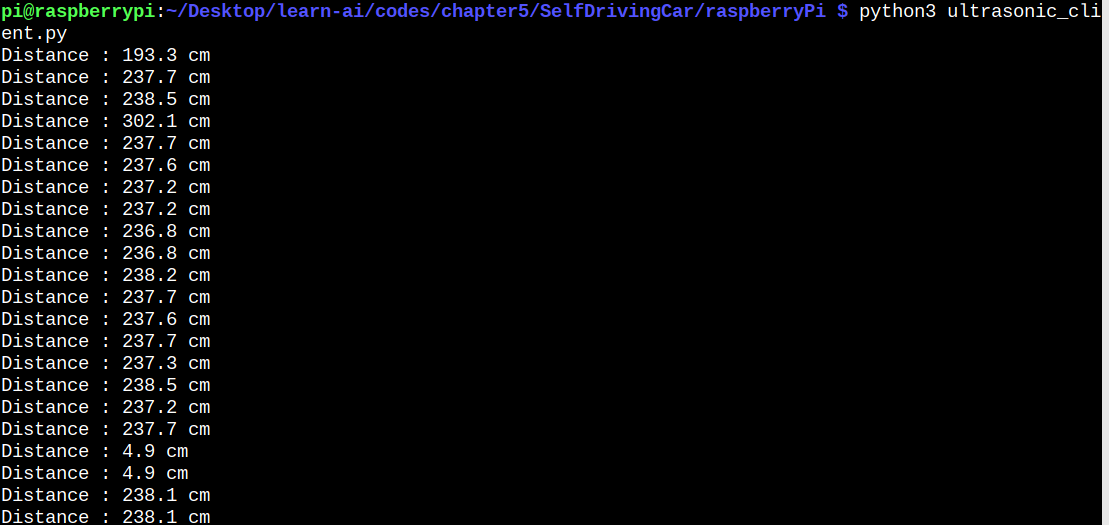
3.在新的终端窗口中输入以下命令
cd ~/Desktop/learn-ai/codes/chapter5/SelfDrivingCar
cd raspberryPi
python3 ultrasonic_server_test.py
4.在终端输入ctrl + c来结束当前任务